METHODS USED FOR THE CALCULATION OF ROOTS OF EQUATIONS
METHODS USED FOR THE CALCULATION OF ROOTS OF EQUATIONS

Graphical Methods
Closed methods
Open methods
Graphical Method:
Is to plot the function and see where it crosses the x-axis This item, which represents the value of X for which f (x) = 0 provides an initial approximation of the root.
• If in an interval [a.b] closed marks
f (a) * f (b)> 0 then we have: there are no roots or is an even number of them.
• If in an interval [a.b] closed marks
f (a) * f (b) <0>
Closed methods: bisection, false position.
*Bisection method:
The purpose of the method is to divide an interval always half in successive iterations to investigate the change of sign.
Suppose we want to solve the equation f (x) = 0 (where f is continuous. Given two points a and b such that f (a) f (b) have opposite signs, we know from Bolzano's theorem that f must have at least a root in the interval [a, b]. The bisection method divides the interval into two, using a third point c = (a + b) / 2.
At this time, there are two possibilities: f (a) f (c ), or f (c) and f (b) have opposite signs. The bisection algorithm is applied to the subinterval where the sign change occurs.
The bisection method is less efficient than Newton's method, but is much safer to ensure convergence.

Convergence is guaranteed if f (a) f (b) have opposite signs.
1. Is to find an interval (a, b) to ensure that the function root.
2. Find the midpoint of the interval, taking the point of bisection (c) as a proxy for the desired root.
3. It then identifies which of the two intervals is the root. Choose between (a, c) and (c, b), a range in which the function changes sign.
4. We review the stopping criterion. The process is repeated n times, until the bisection point (c) practically coincides with the exact value of the root.
*FALSE POSITION METHOD
It is practically the same method but has a bisection difference.
Instead of using a point intersection method is used on a line with the axis x. Then using similar triangles we have:

The algorithm is getting on at every step a smaller interval that includes a root of the function f
OPEN METHOD: FIXED POINT, NEWTON RAPHSON, SECANT.
*FIXED POINT METHOD
This method is based on obtained from the equation f (x) = 0 an equivalent equation of the form g (x) = x whose solution becomes a fixed point of ge iterating from an initial value until it reaches.
This method is applied to solve equations of the form
x = g (x)
If the equation is f (x) = 0 then can be solved for x or else add x on both sides of the equation to put it in an appropriate manner.
For example: x2-2x+3=0 is fixed for X=x2+3/2
*NEWTON RAPHSON METHOD
The Newton-Raphson method is an open, in the sense that their global convergence is not guaranteed. The only way to achieve convergence is to select an initial value close enough to the desired root. Thus, we must start the iteration with a value reasonably close to zero (called the starting point or assumption).
The relative proximity of the starting point to the root of much depends on the nature of the function itself, if it shows multiple points of inflection or large earrings in the vicinity of the root, then the probability that the algorithm diverges increase, which requires selecting an assumed value close to the root.
Once this is done, the method linearizes the function by the tangent line at that assumption. The abscissa at the origin of this line will be, according to the method, a better approximation of the root as the previous value.
Will successive iterations until the method has converged sufficiently.
STEPS
1. Taking F (x) = 0 calculate the derivative of the function symbolically.
2. Choose an initial value, xi.
3. Find Xi +1 through Newton-Raphson formula.
4. Calculate% Ea.
5. Ea ≤% If% Then we report the results of the root, otherwise make the calculated +1 xi xi is the new and return to step 3.
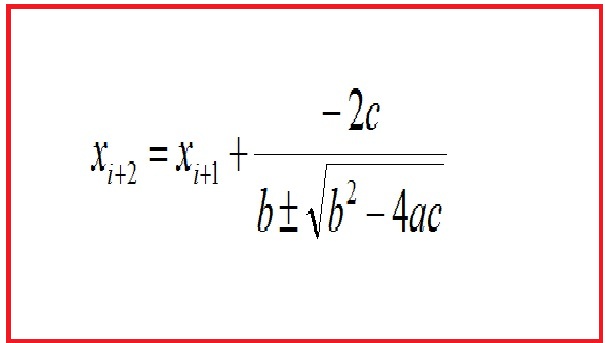
 SECANT METHOD
SECANT METHOD
In numerical analysis of the secant method is a method for finding the zeros of a function in an iterative fashion.
It is a variation of Newton-Raphson method where instead of calculating the derivative of the function at the point of study, bearing in mind the definition of derivative, the slope is close to the line that connects the function evaluated at the point of study and the point from the previous iteration. This method is especially relevant when the computational cost of deriving the function of study and evaluate is too high, so Newton's method is not attractive.
 REFERENCES:
REFERENCES:
(1)NUMERICAL METHODS FOR ENGINEERS WITH PERSONAL COMPUTER APPLICATIONS. STEVEN C. Chapra / Raymond P. CANALE
(2)http://www.concepcionabraira.info/wp/?p=305
(3) internet-google.
(4)Enciclopedia libre wikipedia